IVN(In-Vehicle Network)
IVN 발전의 역사, 동향
일련의 로드맵 E/E 아티텍쳐 개발을 위한 일련의 로드맵

- 로드맵 6단계
- 모듈화
- 통합
- 중앙 집중화
- 도메인 통합
- ZCU가 포함된 차량용 컴퓨터
- 차량 클라우드 컴퓨팅
- 2015년에 BOSCH사에서 E/E 아키텍쳐의 개발에 대한 일련의 로드맵을 발표함. 위의 그림과 같은 프레임워크로 제시가 되어 많은 오해와 질문을 남김.
- Zone-based가 Domain-based의 발전된 다음단계의 아키텍쳐라고 혹은 Zone-based와 Domain-based가 동일하다고 잘못된 이해를 불러 일으킬 수 있게함
- 두 아키텍쳐는 각자 다른 개념으로 Centralized를 최종 목표로 하는 각기 다른 종류의 아키텍쳐라고 봐야함
- 실제로 위 사진에서 제시된 일련의 로드맵은 뚜렷한 개발 생태계와 제품 및 제품 시리즈의 다양한 요구 사항으로 인해 OEM(Original Equipment Manufacturers) 또는 Tier1 공급업체의 다양한 요구 사항을 충족하기 어렵다는 문제가 존재
- 잘못된 이해를 바로 잡기위해 논문에서는 아래와 같은 병렬로드맵을 참고로 하여 정확한 이해를 도움.

- 제안된 병렬 로드맵 3단계
- 전통적인 E/E 아키텍처 단계
- E/E 아키텍처 토폴로지의 최신 병렬 개발 로드맵 단계
- 미래의 집중형 및 차량 클라우드 E/E 아키텍처 단계
- 도메인 지향 루트
- 고속 점대점 이더넷은 DCU를 상호 연결하기 위한 백본 네트워크 역할을 함
- 파워트레인 DCU와 샤시 DCU를 모션 컨트롤 DCU로 통합하여 차량의 역동성과 경제성을 관리하는 방식과 같이 DCU 간에 지속적으로 통합됨
- 궁극적으로 모든 DCU가 하나의 차량 컴퓨터로 통합되어 컴퓨팅 파워 기능의 통합과 컴퓨팅 파워 집중을 실현함



- 지역 지향 루트
- 구역 중앙 집중화에서 ECU는 제어 기능을 공유하는 ZCU에 중앙 집중화됨
- 부품 영역 융합에서 마스터-ZCU는 대부분의 기능을 처리하는 반면 슬레이브-ZCU는 네트워크 통신에 중점을 둠
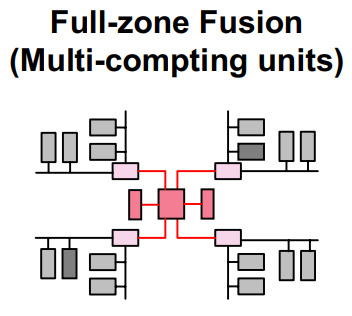
- Full-Zone Fusion은 마스터-ZCU가 고성능 컴퓨팅을 위한 컴퓨팅 코어를 형성하고 기능적 역할이 없어지고 네트워크 통신에 중점을 둔 주변 ZCU와 통신함



- 위의 두가지 방식을 결합한 하이브리드 접근 방식은 ZCU를 활용하여 ECU 수를 효과적으로 최소화함으로써 구역 지향 아키텍처의 장점을 결합함. 또한, 와이어링 하니스 조직, 확장성 및 상호 교환성이 향상됨. 동시에 하이브리드 아키텍처는 도메인 지향 아키텍처의 특성을 통합하며, 이는 결합된 함수의 계산을 중앙 집중화하는 원칙을 준수함

Classic IVN Architecture
- 전통적인 IVN 아키텍쳐에 OBD를 차량에 도입하면서 이더넷이 적용됨, 게이트웨이가 ECU와 외부의 OBD 커넥터를 연결하여 고장을 진단
- 이더넷은 더 빠르고 자세한 진단 정보를 전송할 수 있어 문제를 감지하고 해결할 수 있고 기존의 프로토콜에 비해 훨씬 높은 데이터 전송 속도를 지원하기 때문에 OBD가 도입에 유리
- 게이트웨이(gateway): 컴퓨터 네트워크에서 서로 다른 통신망, 프로토콜을 사용하는 네트워크 간의 통신을 가능하게 하는 컴퓨터나 소프트웨어를 두루 일컫는 용어, 즉 다른 네트워크로 들어가는 관문(입구) 역할을 하는 네트워크 포인트
- E/E 컴포넌트는 다양한 E/E 시스템을 위한 차량 내 ECU를 연결하기 위해 CAN, CAN-FD, LIN , FlexRay 및 MOST 와 같은 다양한 버스 기술을 주로 사용하여 분산된 방식으로 설계 및 개발
- Tesla Model S/X의 와이어링 하네스 시스템의 길이가 총 3000 m.
- Model 3/Y는 Zone-oriented의 3개 도메인을 갖는 E/E 아키텍처를 채택하여 와이어링 하니스를 1500m에서 100m로 줄임
- 네트워크 기술적인 측면
- 하지만 대역폭, 특성 및 애플리케이션의 한계가 존재하여 자율 주행 차량에서 증가하는 최신 E/E 아키텍처의 요구 사항을 충족하지 못하기 때문에 새로운 Architecture 개발의 필요성이 생김.
- 두가지 측면에서 기존 네트워킹 기술은 부적절함
- 첫번째 측면: 전통적인 버스 기술 중 자율 주행 또는 고급 인포테인먼트에 필요한 고화질 비디오 스트림을 적절하게 전송할 수 있는 기술이 존재하지 않음.
- EX) 1920×1080 해상도, 24비트 심도, 60fps 및 10배 압축비의 사양을 갖는 비디오 스트림은 약 300Mbps 대역폭을 요구함
- 두번째 측면: 전통적인 버스 기술은 최신의 차량엔 필수적인 기능인 보안 기능, 실시간 기능 및 MAC 기반 또는 IP 기반 스케줄링 기능이 부족함.
- 첫번째 측면: 전통적인 버스 기술 중 자율 주행 또는 고급 인포테인먼트에 필요한 고화질 비디오 스트림을 적절하게 전송할 수 있는 기술이 존재하지 않음.
- 위의 두가지 측면을 해결하기 위해 새로운 IVN 기술이 생김
- 고대역폭 통신 기능을 제공하는 Automotive Ethernet, 우수한 실시간 보증을 제공하는 TSN, 서비스 중심의 기능을 제공하는 SOA기술

클래식한 IVN 구조의 예시1 (출처: https://blog.teledynelecroy.com/2023/02/the-evolution-of-in-vehicle-network.html)  클래식한 IVN 구조의 예시2 (출처: <차량내 네크워크 기술> 논문번호 18-02-44 292)
클래식한 IVN 구조의 예시2 (출처: <차량내 네크워크 기술> 논문번호 18-02-44 292)
- 고대역폭 통신 기능을 제공하는 Automotive Ethernet, 우수한 실시간 보증을 제공하는 TSN, 서비스 중심의 기능을 제공하는 SOA기술

Zone/Domain-based IVN Architecture
- 자율주행과 같은 차량 신기술 도입으로 더 많은 전자장치와 센서가 들어가게 되고 이는 곧 낮은 Latency를 유지하기 위해 더높은 Bandwidth를 요구하게 됨. 최신의 IVN은 Backbone Network에 이더넷을 사용함으로써 발전




- Zonal 은 차량을 물리적 공간에서 영역을 나누어 ZCU가 가까운 ECU들을 한데 묶어서 Zone을 형성하는데 반해, Domain은 차량을 기능적 역할을 기준으로 영역을 나누어 ECU가 담당하는 기능에 속하는 영역에 ECU가 연결됨.
- Domain 기반
- Domain은 DCU들끼리 "게이트웨이"를 통해 서로 통신하고 Zonal의 ZCU들끼리 "Backbone"을 통해서 통신함.
- Domain의 DCU들끼리는 게이트웨이를 통해 연결됨. 서로 다른 도메인은 서로 다른 물리 계층을 사용할 수 있으며, 이는 서로 다른 버스 시스템을 의미함. 일부는 이더넷을 사용할 수 있고, 다른 일부는 CAN을 사용할 수 있음. 게이트웨이는 서로 다른 도메인 간의 변환을 처리하고 모든 ECU 간의 원활하고 안전하며 올바른 통신을 보장
- 게이트웨이 혹은 수많은 ECU들의 기능을 DCU로 통합함으로서 각 도메인 내의 ECU의 수를 줄임
- Zone 기반
- Zonal-based 는 각 Zone 안의 ECU가 ZCU에 연결되어 제어가 되며, 각각의 Zone들을 관리하고 통합할 수 있는 중앙에 배치된 컨트롤러인 CCU가 존재. Zonal은 새로운 전자장치나 기능을 추가하기 용이하여 확장성이 크고 변화에 유연하다는 장점이 존재
- 고속 데이터 "Backbone"을 통해 구역 컨트롤러에 연결된 중앙 컨트롤러인 CCU는 데이터 융합 및 더 높은 수준의 의사 결정 기능을 수행함. Backbone은 또한 자율 주행에 필요한 데이터 중복성(Data Redundancy)을 제공하는 역할을 함. 컨트롤러 간에 교환되는 데이터의 양과 외부 고속 네트워크에 연결해야 하는 필요성 때문에, 특히 중앙 컨트롤러와 백본 기능을 위해 더 빠른 속도와 더 높은 처리량이 이 아키텍처에 필수적임. 10 Mbit/S를 훨씬 넘는 속도로 데이터를 이동할 수 있어야 함
- Zonal의 경우 Tesla Model 3 와 Zonal이 적용된 BMW의 경우 CCU(혹은 singular vehicle computer)가 없이 각각의 ZCU가 모든 기능을 분담해서 수행하기도 함.

| Domain-oriented route | Zone-oriented route | |
| Features | Functions of ECUs are gradually integrated into DCUs, cross-domain DCUs and vehicle computer | Components of sensors, actuators and ECUs are connected to ZCUs nearby, with functions partly and fully centralized |
| Ecological compatibility |
Roadmap is relatively smooth, which satisfes the ecology of most OEMs and Tier1 suppliers | More suitable for new car manufacturers in automotive industry (e.g., Tesla), and new Tier1 suppliers1 (e.g., Huawei) |
| Scalability and interchangeability |
Subject to more limitations, such as wiring harness, intra-domain communication load, etc | Support more functional variants, plug and play with strong replaceability |
| Functional safety and realtime property |
Integrate into domain controller according to function, it is easier to design the ASIL functional safety level of the domain controller [55]. This task is mostly accomplished by Tier1 suppliers | Difcult for functional safety design of ZCU to be provided by traditional OEMs to Tier1 suppliers for separate design. ZCU has high requirements for functional safety and multi-core controllers |
| Backbone network requirements |
Most of data transmission is realized in each functional domain with relatively low requirements on transmission rate and transmission characteristics of Ethernet backbone | All kinds of signals will be transmitted to target electronic unit through backbone Ethernet, which imposes requirements and characteristics on transmission rate of backbone network |
| Harness cost saving |
Less reduction in length and weight of wire harness | Reduce wiring harness and improve wiring efciency and wiring automation |
- Zone 과 Domain의 차이
- 도메인 지향 E/E 아키텍처 모델에서 백본은 스위치와 함께 DCU1(인포테인먼트), DCU2(바디), DCU3(파워트레인 및 섀시), DCU4(ADAS) 등 4개의 DCU로 구성됨. 각 DCU는 기능 도메인 내의 ECU와 연결을 설정하여 기능 계산 및 제어를 위한 메시지 상호 작용을 용이하게 함.
- 반대로 존 지향 E/E 아키텍처 모델에서 백본은 ZCU1(인포테인먼트 및 바디), ZCU2(ADAS 및 바디), ZCU3(바디), ZCU4(바디, 파워트레인 및 섀시)의 4개의 ZCU와 4개의 스위치를 갖춤. 각 ZCU는 가장 가까운 ECU에 연결됨. 해당 컴퓨팅 기능이 ZCU에 저장되어 있으면 ECU의 메시지가 직접 셀로 전송되어 계산됨. 컴퓨팅 기능을 사용할 수 없는 경우 ZCU는 라우팅 기능만 사용하여 메시지를 다른 ZCU로 전송함.
- 높은 데이터 전송률과 대역폭을 필요로 하지 않는 작업도 있기 때문에 모든 IVN 설계에는 여러 대의 버스가 포함
- 파워 트레인이나 바디/컴포트 도메인은 일반적으로 더 느린 네트워크.
- 대부분의 현재 아키텍처에서는 인포테인먼트나 ADAS 시스템과 같은 제한된 수의 기능만 절대적으로 높은 대역폭을 필요.
- 그럼에도 불구하고 높은 데이터 전송률이 필요하지 않은 일부 기능은 매우 중요하고 높은 우선 순위가 필요.
- 예) 안전 기능은 매우 높은 우선 순위를 필요로 하지만 중간 대역폭의 사항을 요구함.
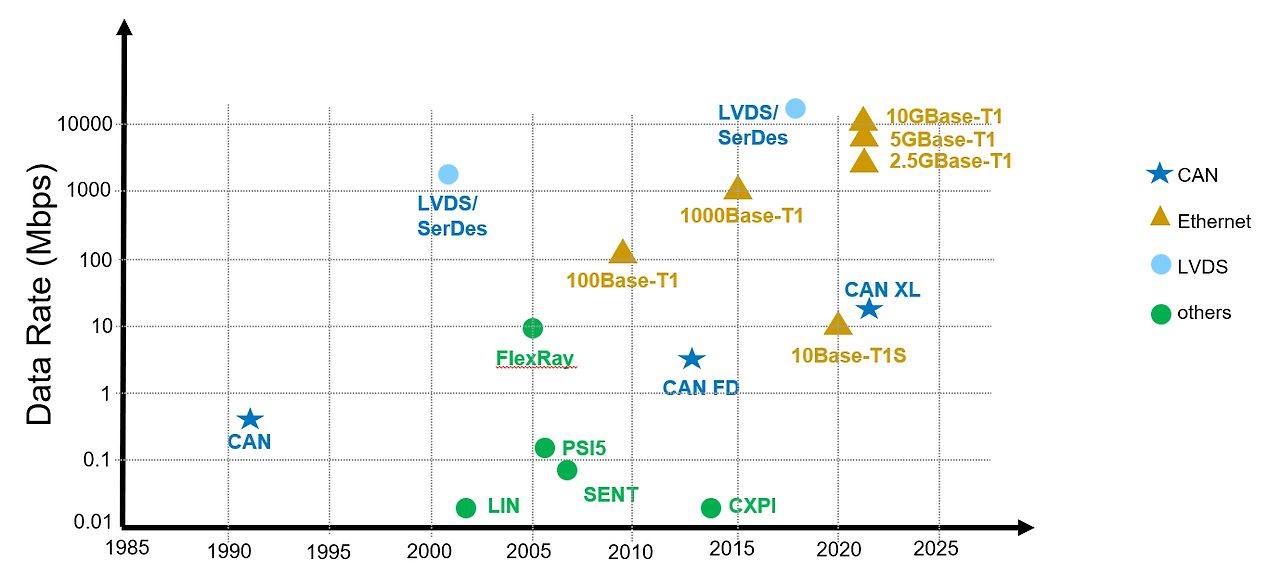
- 10 Mbit/S는 데이터 전송률이 높은 편이기에 많은 기능들에서 이정도 대역폭을 요구함. 그러나 최근까지 1 ~ 10 Mbit/S 사이의 간격으로 작동하는 프로토콜은 거의 없었음.
- 5Mbit/S의 최대 데이터 전송률을 자랑하는 CAN FD는 이러한 격차를 줄이기 위한 초기 시도였음. 데이터 전송률 격차를 메우기 위한 가장 최근의 항목은 데이터 단계에서 최대 20Mbit/S로 작동하는 CAN XL(확장 길이 CAN)과 최대 10Mbit/S로 작동하는 10Base-T1S(10Mbit/s 단일 쌍 이더넷)임.



| Functions | Message parameters settings |
| Powertrain | 16 messages with 20 ms period |
| Chassis | 20 messages with 20 ms period |
| Body | 16 messages with 50 ms period, 2 streams with 100 Mbps |
| Infotainment | 5 messages with 100 Mbps (AVB) |
| ADAS | 10 messages with 100 Mbps (AVB, ST), 8 messages with 1000 Mbps (AVB) |
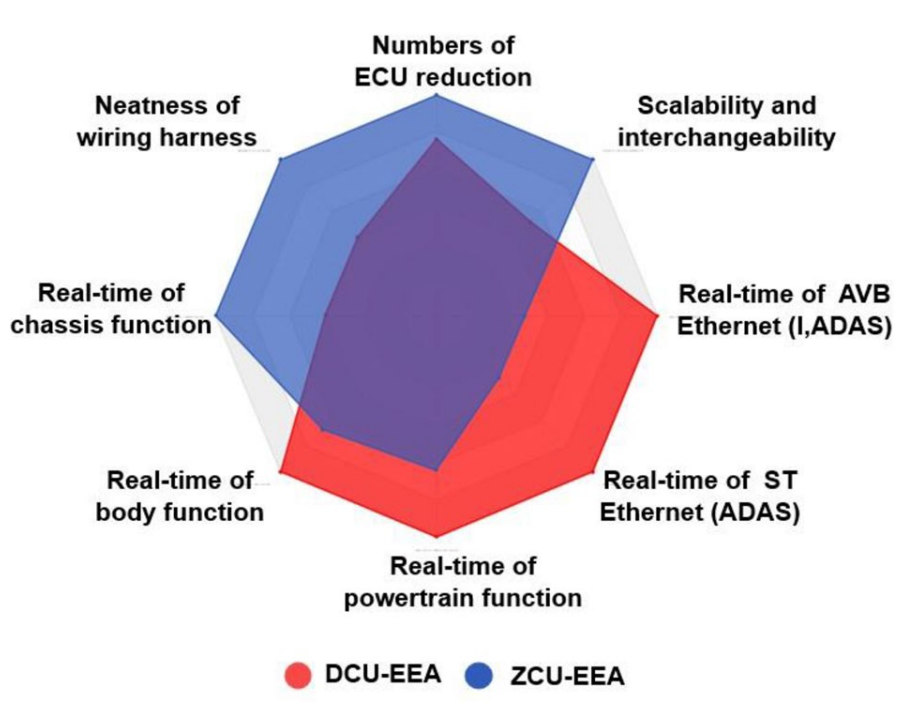
| Message types | Average WCTT with domain-oriented E/E architecture | Average WCTT with zone-oriented E/E architecture |
| Body | 16.833 ms/16 | 21.842 ms/16 |
| Chassis | 25.52 ms/20 | 12.510 ms/20 |
| Powertrain | 16.8 ms/18 | 17.4 ms/18 |
| ST Ethernet | 0.402 ms/9 | 1.184 ms/9 |
| AVB Ethernet | 0.692 ms/14 | 1.674 ms/14 |



Networking Technologies for E/E Architectures
- 이더넷: 근거리 통신망(LAN)의 일종으로서 널리 사용되는 네트워크 방식. 기존 이더넷의 한계는 실시간성과 확정성을 담보하지 않는다는 점. 어떤 이유로든 통신 지연이 발생할 경우, 혹은 통신이 단절되더라도 이더넷에는 이에 대한 해결법이 정의돼 있지 않음
- 현재 Quality of Service (QoS) , clock synchronization , communication redundancy , functional safety , information security를 향상시키기 위해서 여러 네트워킹 기술이 존재함.
- 차량용 이더넷
- 현재, 자동차용 이더넷은 100Mbps, 1~10Gbps의 전이중 전송 속도를 지원함. 이는 IEEE 802.3bw-2015, IEEE 802.3bp-2016, IEEE 802.3ch-2020 및 IEEE 802.3cg-2019에 의해 표준화됨.
- 확장된 TSN(Time-Sensitive Networking) 프로토콜을 지원하는 차량용 이더넷은 데이터 플로우 동기화와 관리, 제어 및 무결성을 향상시켜 자율 주행에 필수적인 낮은 latancy와 jitter 및 안전한 통신을 보장함
- 차량용 이더넷은 2가지 측면에서 장점이 두드러짐
- 높은 대역폭으로 인해 차량 내 네트워크는 더 많은 수의 오디오 및 비디오 스트림을 전송가능.
- 저지연 및 저지터 특성은 다양한 유형의 메시지에 대한 QoS(Quality of Service)를 보장
- 차량용 TSN 네트워킹 기술
- TSN 네트워킹 장점: 메시지를 효율적으로 분류하여 네트워크 제어에 사용되는 메시지, 오디오 및 비디오 메시지 또는 Best-Effort 메시지(대역폭, 딜레이, 로스 등 통신에서 중요한 어떤 특성도 보장을 하지 않는, 최소한의 것도 만족시켜 주지 못할 수도 있는 트래픽 메시지)에 대한 기존 이더넷에 비해 정확한 전송을 제공 ▶ 차량 제어 기능의 신뢰성과 안정성을 보장하여 차량 기능들의 안전성을 유지
- TSN은 차량에 지능형 기능을 제공하면서 카메라 및 디스플레이와 같은 오디오 및 비디오 통신 요구 사항에 최적의 스트리밍 특성을 제공
- 2012년 AVB 프로토콜 제품군에서 진화한 TSN(Time-Sensitive Networking) 프로토콜 제품군은 자동차 이더넷과 함께 고대역폭 및 고실시간 통신 기능을 통해서 차량용 이더넷의 단점을 보완하고 네트워크의 기능을 강화하도록 설정되어 있음.
- 도메인 지향 및 구역 지향 자동차 E/E 아키텍처에 적용하기 위해 고안된 TSN 기술은 이더넷(백본)을 통한 실시간성 및 신뢰성 있는 메시지 전송을 용이하게 함. 메시지는 계산을 위해 도메인 제어 장치(DCU) 또는 구역 제어 장치(ZCU)로 향하며, 게이트웨이 라우팅 장치를 통해 원활한 통신을 가능하게 함
- 현재 업계는 다른 TSN 프로토콜에 비해 설계 및 임베디드 개발 비용이 저렴하기 때문에 자동차 시스템에 TSN 내에서 CBS(Credit-Based Shaper) 프로토콜을 채택하는 경향이 두드러짐
- CBS프로토콜:
- 차량용 SDN 네트워킹 기술
- 소프트웨어 정의 네트워킹(SDN)은 최근 몇 년 동안 control plane과 data plane을 분리하는 패러다임을 도입하여 네트워킹 기술로 부상함. 이러한 분리를 통해 네트워크 포트를 통해 네트워크 평면을 동적으로 구성하여 유연한 서비스 요구 사항을 충족시킬 수 있음.
- SDN 기술은 DCU, ZCU 또는 스위치의 기능을 유연하게 제어하여 네트워크 상태를 포괄적으로 관리할 수 있음.
- 예를 들어, 차량이 고속으로 주행 중일때 주행 관련 메시지의 전송 빈도를 증가시켜 더 높은 주행 성능을 달성하고, 저속 운행 중에 원래 상태로 복귀하는 등 네트워크 평면을 동적으로 구성하여 상황에 맞춰 유연하게 통신을 구현
- 차량용 SOA 네트워킹 기술
- SOA(Service Oriented Architecture) 기술은 고정된 메시지 전송 간격에 의존하는 기존의 통신 매트릭스와 달리 SOME/IP 프로토콜을 기반으로 실시간 요구사항에 따라 동적으로 전송 서비스를 정의함.
- 기본 하드웨어와 상위 계층 서비스 애플리케이션 간의 통로 역할을 수행하여 상위 계층 서비스의 유연한 호출을 용이하게 함으로서 통신 부하 및 ECU 전력 소비를 줄이는 데 효과적임
- 예를 들어, SOA를 차량 네트워크에 적용하면 조명이 필요할 때에만 조명 ECU와의 통신이 활성화되고 도메인 지향 E/E 아키텍처에서 ADAS의 DCU든 존 지향 E/E 아키텍처에서 ADAS 기능과 통합된 ZCU든 자율 주행 기능을 사용중일 때에만 ACC 또는 AEB와 같은 기능의 활성화에 대한 결정이 이루어짐. 다른 제어 유닛을 호출하기 위해 통신 서비스 자체가 필요한지에 대한 여부를 결정함.
- 이를 통해서 임베디드 플랫폼에서 전력 소비를 줄이는 데 기여함
- 미래형 통합 네트워킹 기술
- TSN 기술은 주로 통신 메시지 전송의 실시간 성능을 보장하며, 지연이 적고 지터가 낮은 것을 특징으로 함.
- SDN 기술은 제어 가능한 관리 계층을 차량 내 네트워크 아키텍처에 도입함으로서 네트워크 평면을 동적으로 구성하여 상황에 맞춘 유연한 통신 가능.
- SOA 기술은 서비스 기반 기능을 통합함으로써 E/E 아키텍처에서 서비스의 유연성을 향상시킴.
- TSN 기술은 주로 통신 메시지 전송의 실시간 성능을 보장하며, 지연이 적고 지터가 낮은 것을 특징으로 함.
과제 및 미해결 문제
- 다중 네트워킹 메커니즘의 공동 설계
- 초고속 자동차 네트워크
- 안전 강화 및 보안 강화
- 차량 내 네트워크 표준화
- 임베디드 플랫폼에 적용
'SDV 조사자료 > 통신' 카테고리의 다른 글
| IVN(In-vehicle network)[원문 발췌] (0) | 2024.08.12 |
|---|---|
| CAN통신(2) (0) | 2024.07.09 |
| CAN 통신(1) (0) | 2024.07.08 |
| ECU와 E/E 아키텍쳐(1) (1) | 2024.07.03 |